
Tuesday, September 29, 2020 From rOpenSci (https://ropensci.org/blog/2020/09/29/mapscanner/). Except where otherwise noted, content on this site is licensed under the CC-BY license.
🔗 mapscanner
It is sometimes easy in the midst of the cutting-edge world of unique software development that is rOpenSci to forget that even though our software might be freely available from anywhere in the world, access to adequate hardware is often restricted. Restricted access to hardware is rarely acknowledged as a reason for differing outcomes from the practice of science in different parts of the world, yet being in a part of the world that is relatively less financially advantaged must translate to being relatively less able to take advantage of the abilities of computer hardware.
Just as many people might argue that social media have transformed our quotidian social lives, developments in computer hardware, and particularly in portable screen-based devices, have transformed the practice of social sciences. I would happily wager that almost everyone would admit that the last survey or questionnaire they completed was done with some kind of computer hardware, rather than with pen and paper. And yet conducting social research with computer hardware remains impossible for very many scientists, who are instead restricted to what many would generally refer to as “less” technologically sophisticated solutions like pens and paper.
One technological development that has particularly impacted both life in general, and the practice of social sciences, has been interactive mapping systems – think how easy it is to use a smartphone to find somewhere to eat in an unfamiliar city. Coupled with portable screen-based devices, such systems greatly expand abilities to generate detailed, spatially explicit data on all aspects of social and natural environments. Yet screen-based systems for social and other research which allow for the input of spatially explicit data are often prohibitively expensive, and require those conducting such research to have access to large numbers of portable, screen-based devices in order to generate sufficient data. The comparative disadvantage placed upon scientists and scientific communities who do not have access to the kinds of funds necessary to conduct such research can easily accumulate to become systemic disadvantage.
With due acknowledgement that no single measure can be effective in overcoming systemic disadvantage, the new rOpenSci package mapscanner aims to enable and empower the kinds of technologically sophisticated social research previously only available at considerable price. The package is able to convert scanned hand-drawn marks on a physical map to spatial objects suitable for any and all kinds of subsequent analyses. It therefore enables spatially detailed social research to be conducted with pen and paper, minimally requiring little more than a printer to print survey maps, a mobile phone with a camera to digitise any marks made by hand upon the printed maps, and a single computer capable of running R. The package is likely to be of general utility for spatial analyses in general, in domains such as geography, ethnography, anthropology, archaeology, ecology, botany, political science, and many more, with potential use cases as diverse as the variety of hand-drawn marks on maps.
The following section provides a very brief overview of functionality, followed by considering a few use cases to which the package may be applied.
🔗 Package functionality
Package functionality is described in the main
vignette,
with this section providing only a very brief overview necessary to
contextualise what follows. The package has only two primary functions,
ms_generate_map()
to generate maps for printing, and
ms_rectify_map()
for rectifying a scanned or photographed map against the original
printed version. The typical workflow as described in the vignette runs
something like the following:
- Use
ms_generate_map()to generate your desired map in both.pdfand.pngformats. At least one of those files must be retained to enable subsequent rectification in step 5, below. - Print however many copies of the map you desire.
- Go outside and conduct your research, getting people to draw on the paper maps. Markings must be made in colour, and must be either dots or lines enclosing defined areas.
- Scan or photograph all drawn-upon maps back in to some appropriate digital form.
- Use
ms_rectify_map()to rectify the drawn-upon versions against the spatial coordinates of the original map, and thereby to convert all markings tosf-format spatial representations. - Analyse your results.
🔗 Use Case #1 – Point-based analyses
mapscanner rectifies points by allocating each distinct mark on a map to its geometric centroid, enabling points to be drawn as dots of arbitrary size, crosses, asterisks, or any marks with distinct centres. Such point-based marks can be converted through the functionality of the package into estimates of local densities, or any other measure applicable to a particular study.
For this use case, we’ll consider applying the package to map urban trees. Trees are very important for healthy urban life. Knowing the locations of trees can be very useful for urban planners, yet very few cities provide openly available databases of tree locations (exceptions include the comprehensive database of Vancouver, Canada). One of the difficulties of tree databases is that they require constant updating as trees grow and decline, get injured, or die and get removed. Updating corresponding databases generally requires extensive manual intervention, which is why, for example, the Open Street Map (OSM) database contains relatively few comprehensive data sets on urban trees. The database for Vancouver lists almost 150,000 trees, for example, yet only a tiny fraction of these are contained within the OSM database (1,304 at the time of writing).
Mapping trees is obviously best done as a collective exercise, yet any attempt to collate and maintain a tree data base faces three primary hurdles:
- Finding sufficiently many participants to ensure adequate coverage;
- Ensuring that each participant has access to an appropriate technological device; and
- Ensuring that each participant is able to use the software deemed appropriate for a particular mapping exercise.
The mapscanner package can at least entirely remove two of these three impediments to the successful collation and maintenance of a tree data base, leaving only the problem of finding sufficiently many participants. Perhaps more importantly, the package will largely remove barriers to participation, through requiring that participants be provided with nothing more than a printed map of their local area of the city. Each tree could then be simply marked on each map, all maps scanned or photographed back in, the results rectified to the original coordinate system, and aggregated to generate a unified data base of tree locations. (Some data cleaning may of course be necessary, for example to remove duplicate entries through imposing minimal-distance criteria or similar.)
A city could effectively construct and maintain a tree data base using the mapscanner package through encouraging community groups to simply spend a short amount of time on a regular basis (such as an hour or two per year) walking around their neighbourhoods and marking trees on a piece of paper. If the data were also uploaded to Open Street Map, then the results from previous years could be made visible on the initially printed maps, and participants need only note any changes from the previous year.
🔗 Use Case #2 – Where is downtown?
A paper from 2003 by Montello, Goodchild, Gottsegen, and Fohl (Spatial Cognition and Computation 3, 185–204) posited the question of “Where’s downtown?”. The authors were mostly based in Santa Barbara, USA, and asked 36 people to sketch their understanding of the spatial extent of the downtown area of that city. The results were presented in two primary forms, either as a series of overlapping lines representing the boundaries drawn by each participant, or as an equivalent series of rasterized dots, shaded according to numbers of polygons containing each dot. A similar, possibly slightly less academic, analysis was conducted for the London (UK) neighborhood of Dalston, clearly indicating that, while “official” boundaries may be clean-cut, people’s lived understandings are often much less so. (Click here for an interactive map featuring part of the road traversed for that study.) The mapscanner package can be used to analyse collective subjective perspectives of space.
Consider, for example, Dalston. Dalston is not, nor has ever been, an official administrative location in London, and there are therefore no official boundaries. (This has the effect that typing “Dalston” into your preferred online map service will generally return a single point, whereas typing in officially-recognized locations like neighboring or partially-enclosing “Hackney” will return a polygonal boundary.) Nevertheless, those for whom Dalston is a part of their everyday life know where Dalston is. The problem is that each person has a slightly different idea. My own delineation of Dalston might look something like the following:
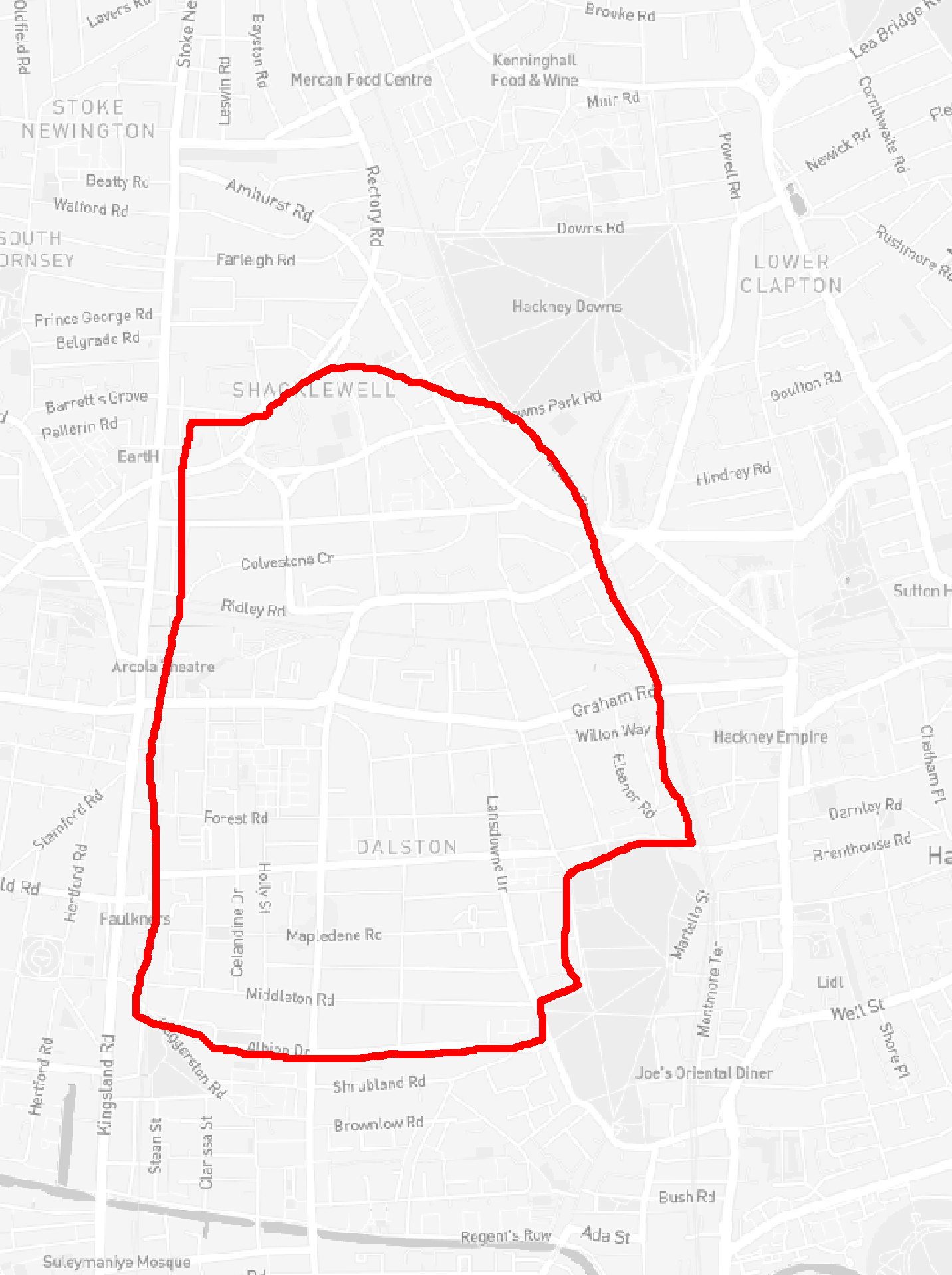
Subjective boundary of Dalston, UK
That boundary that I drew by hand on top of the map can be immediately
converted to a spatially rectified polygon via the ms_rectify_map()
function.
library (mapscanner)
x <- ms_rectify_map (map_original = "dalston.png", # name of original map
map_modified = "dalston-bdry.png") # scanned version shown above
x
#> Simple feature collection with 1 feature and 0 fields
#> geometry type: POLYGON
#> dimension: XY
#> bbox: xmin: -0.07591964 ymin: 51.53912 xmax: -0.05802125 ymax: 51.55294
#> geographic CRS: WGS 84
#> geometry
#> 1 POLYGON ((-0.05814729 51.54...
The resultant object contains one polygon representing the red
hand-drawn boundaries of Dalston. What the original 2003 study described
above did was to ask their 36 participants to drawn the similarly
unofficial area of “downtown” Santa Barbara, so that they could gain
insight into the collectively subjective location of this area. In their
case, their main result was simply represented as a series of overlaid
lines from which a central tendency was able to be visually perceived.
The mapscanner package enables
more powerful analyses through the
ms_aggregate_polys()
function which aggregates multiple polygons into a single “multipolygon”
object in which each component corresponds to the overlap of some number
of individual polygons. The following figure shows an example of the output of
ms_aggregate_polys().
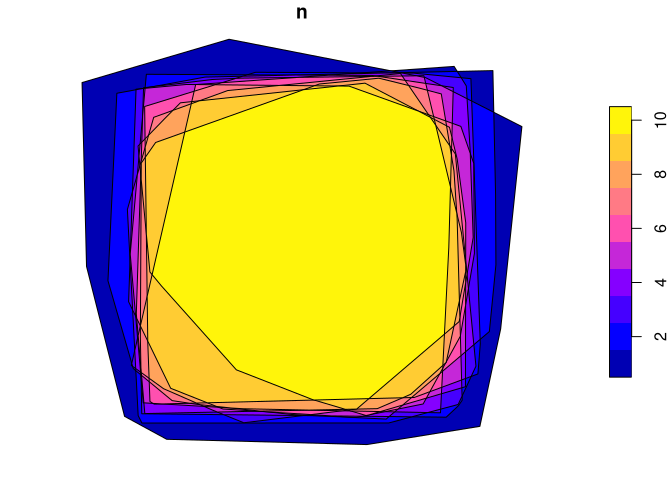
Polygons aggregated with ms_aggregate_polys
These aggregate multipolygons can then be analysed in any number of ways, such as in terms of relationships between area and degrees of overlap (as numbers of individual polygons enclosing the specified area), or through applying further spatial processing routines to determine an “average” boundary of a delineated area, along with estimates of uncertainty at each point.
🔗 Use Case #3 – Line-based analyses
Who has ever wanted to construct a GPS track to provide guidance while
embarking on some kind of outdoor adventure? I quite often do that for
bicycle adventures, and have generally resorted to my preferred tool,
gpsies.com. That brilliant web-based service was, however, recently
bought out, re-branded to alltrails.com, and
has lost much of the original functionality which drew me to the site.
The current version of
mapscanner can rectify points
and polygons, as described above, and yet can not currently rectify
lines. The ability to rectify lines would enable anyone to generate GPS
tracks through simply drawing a desired route on a piece of paper. Even
if gpsies existed in its original form, I suspect it would be much
simpler and easier to simply draw a desired route on a piece of paper
than otherwise needing to click one or two hundred times on a screen in
order to generate an equivalent digital representation.
Implementing line-based analyses requires solving one, and only one, technical hurdle, so if you think that functionality might be useful to you, please get it touch, and even better, please offer to help to overcome the final hurdle and help extend mapscanner beyond rectification of points and polygons, so that it can also convert lines drawn on maps into geographical line objects.
🔗 Acknowledgements
This package was enormously improved through the rOpenSci peer review
process, in
particular through the insightful reviews of Kelly
Hondula and Nicholas
Potter. The contributions of co-author
Michael Sumner were particularly invaluable in
the development of the ms_aggregate_polys() function.
Filed under
Suggest an edit
Open a pull request
